Brushless DC Motors: How They Work and Where They Shine
Discover how brushless DC motors use electronic commutation for smooth, efficient torque, and learn where they excel—from drones to EVs and industrial drives.
Basics
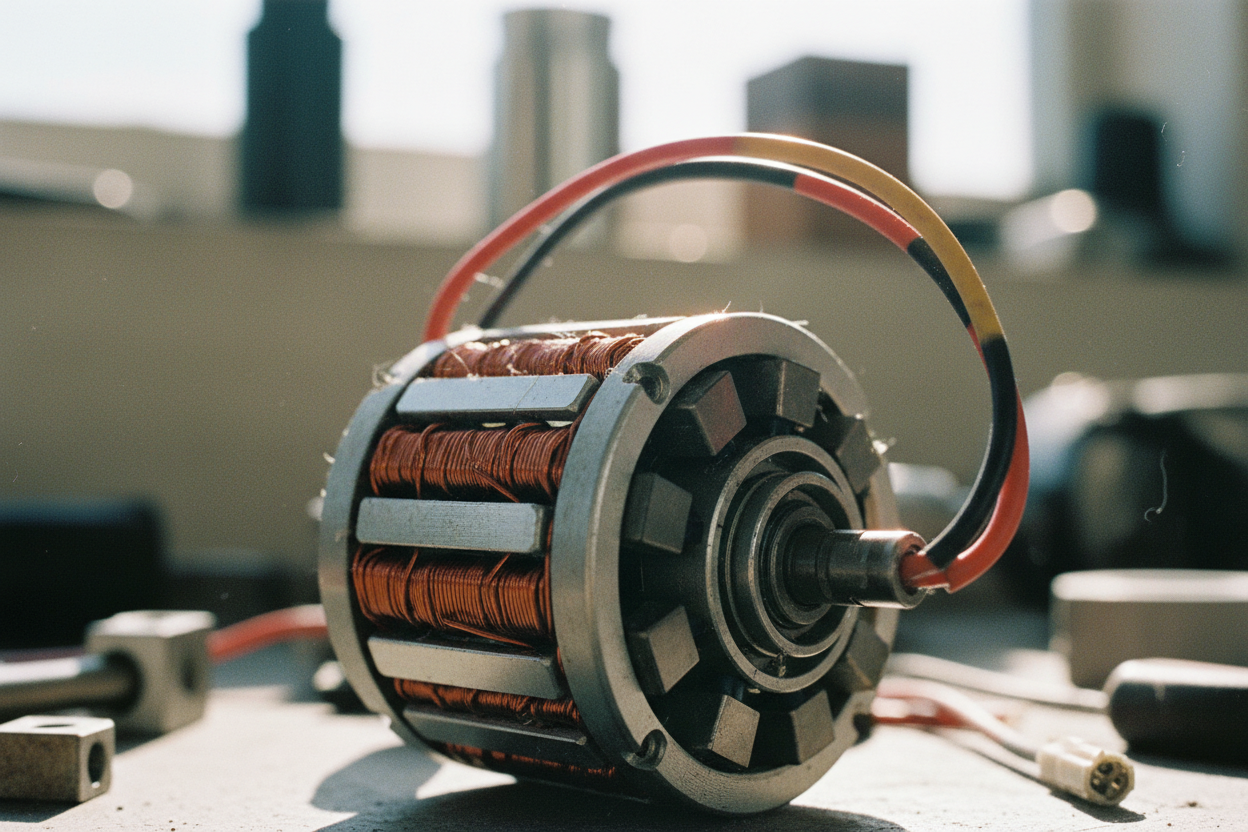
Brushless DC motors, often called BLDC motors, replace mechanical brushes with electronic switching to create rotation. A typical design places copper windings on the stator and permanent magnets on the rotor, eliminating brush wear, sparking, and excess friction. This architecture delivers high efficiency, excellent torque density, and long service life with minimal maintenance. The motor's three phases are energized in sequence to pull the rotor's magnetic poles forward, producing smooth motion across a wide speed range. With fewer components touching or degrading, BLDC units run cleaner and quieter than brushed alternatives, and they tolerate frequent start–stop cycles without the same penalty in heat or wear. Designers can choose inrunner styles for high RPM and compact packaging or outrunner styles for strong low-speed torque. Because the torque is closely tied to current through the windings, BLDC systems support precise control over acceleration, speed, and position when paired with the right electronics and feedback, enabling stable, responsive performance in demanding motion tasks.
Commutation
In a BLDC system, an electronic speed controller (ESC) performs the role of the commutator by switching current among the motor's phases at just the right times. The ESC reads rotor position using Hall sensors or infers it via back-EMF in sensorless configurations, then drives a set of MOSFETs to energize the correct coils. Pulse-width modulation (PWM) regulates average voltage and current, controlling speed and torque while limiting heat. At low speeds, sensors or special startup sequences provide reliable alignment; at higher speeds, the ESC can apply timing advance to reduce lag and improve efficiency. Typical schemes include six-step (trapezoidal) commutation for simplicity and strong torque per amp, and sinusoidal approaches for smoother output. Current limiting and soft-start features protect both motor and supply, while braking modes and direction reversal are handled electronically. The result is brushless motion with low electrical noise, accurate control, and fewer wear-prone parts than brushed designs.
Control Strategies
Control depth determines how refined a BLDC drive feels. Trapezoidal control is simple and effective, using six discrete switching states to produce reliable torque with minimal computation. Sinusoidal control injects smoother phase currents, reducing torque ripple and acoustic signature. Advanced field-oriented control (FOC) transforms phase currents into rotating d–q axes, decoupling flux and torque so the controller can command each independently. With space vector modulation (SVM) and fast current loops, FOC improves efficiency, low-speed smoothness, and dynamic response under changing loads. It also supports regenerative braking when the system path returns energy to the supply. Closed-loop speed or position layers, using PID or model-based regulators, sit above the current loop to maintain setpoints despite disturbances. Designers select strategies based on priorities: minimal cost and good torque (trapezoidal), quiet precision (sinusoidal), or maximum performance across the envelope (FOC). Regardless, accurate sensing, low-latency computation, and well-tuned parameters are key to stable, crisp motion.
Design Considerations
Choosing a BLDC motor involves balancing voltage, current, and speed–torque needs with mechanical and thermal realities. Key electrical parameters include Kv (speed constant), Kt (torque constant), winding resistance, and inductance, which together influence efficiency, responsiveness, and heat. Mechanically, pole count, rotor inertia, and bearing quality shape smoothness and durability. Outrunner formats offer higher torque per size for propellers and direct drives; inrunner formats pair well with gearboxes and high-speed spindles. Thermal paths—from copper to laminations to the housing—govern continuous power; good cooling and generous esc margins prevent derating. On the system side, ensure supply headroom, robust EMI filtering, appropriately sized conductors, and short high-current loops. Pay attention to cable length, shielding, and grounding to keep sensor signals clean. Environmental constraints like vibration, dust, moisture, and desired IP rating guide enclosure choices. Finally, match the duty cycle, gearing, and control method to the load so the motor operates in its sweet spot with reliable, efficient output.
Where They Shine
BLDC motors excel wherever efficiency, precision, and reliability matter. In aerial platforms and lightweight propulsion, their high torque density and quick response deliver punchy takeoff and stable hover while preserving battery life. Personal mobility systems benefit from smooth low-speed control, quiet operation, and regenerative capability during deceleration. In robotics and automation, BLDC drives provide compact actuators with tight speed regulation for pick-and-place, end effectors, and collaborative joints. HVAC and appliance fans use sinusoidal control for low noise and excellent part-load performance, while sealed pumps and compressors exploit brushless longevity in continuous service. Machine tools and spindles leverage high-speed inrunners for clean finishes and responsive acceleration. Gimbals and camera systems prefer low-cogging torque and fine current control for silky stabilization. Even in power tools, BLDC designs deliver more work per charge with cooler operation. Across these domains, the winning traits are controllability, lifecycle value, and consistent performance under real-world duty cycles.